Optimization of Visual Odometry System
cpp_pip
[Slides] [Doxygen]
Project Description
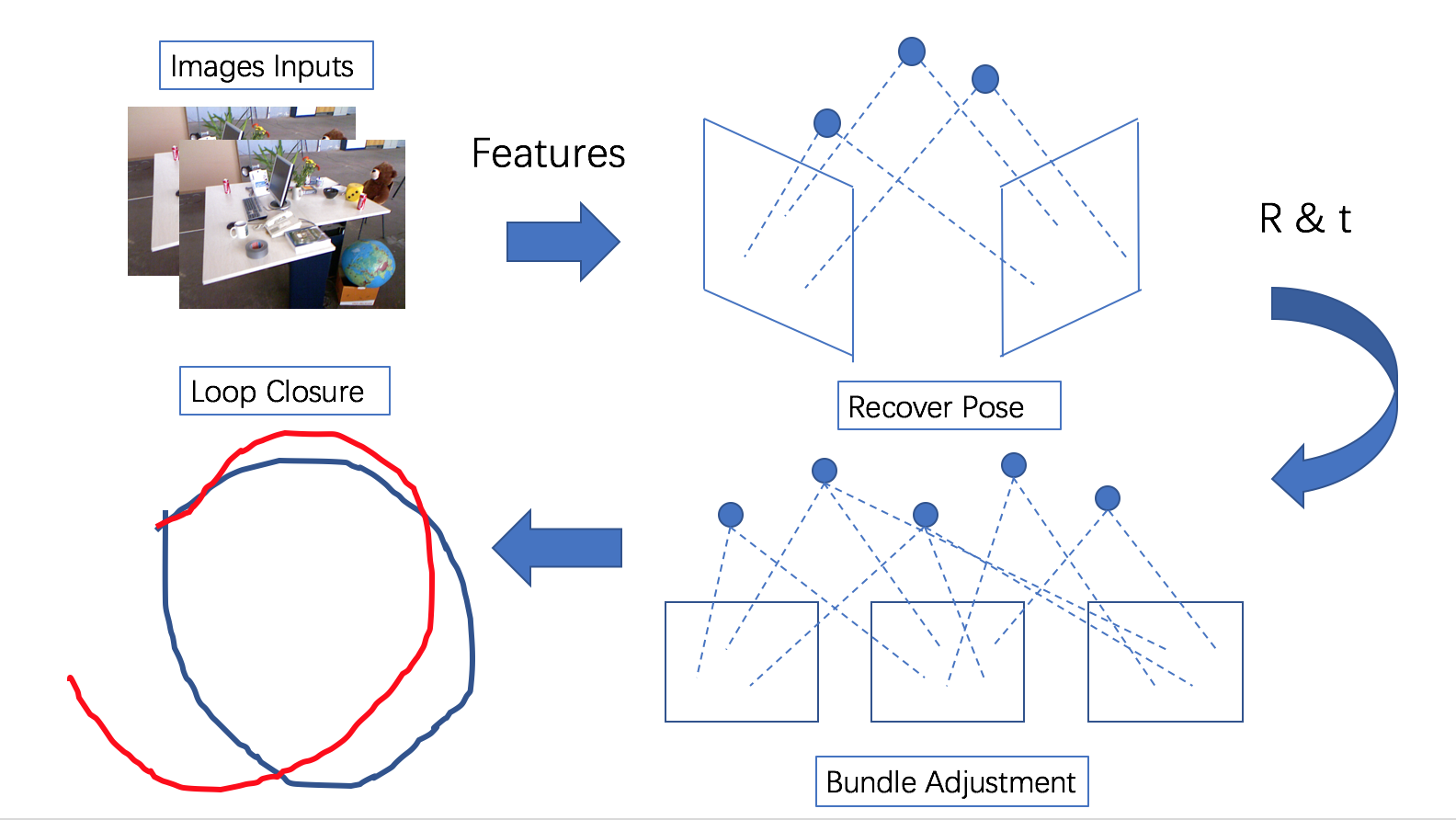
This project builds a visual odometry system with the local optimization (Bundle Adjustment) as well as the global optimization (Loop Closure).
Dependency
- tum_dataset fr2/desk (RGB-D SLAM Dataset and Benchmark)
- Eigen (a C++ template library for linear algebra)
- OpenCV (open source computer vision library)
- Ceres (an open source C++ library for modeling and solving large, complicated optimization problems)
- Boost (provide free peer-reviewed portable C++ source libraries)
- gtsam (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
Compile
You can use the following commands to compile the package.
mkdir build
cd build
cmake ..
make
Run the package
To run a demo, you can use the following commands.
How to use evaluation scripts?
- Put your depth map at
./evaluation/ folder(in format same with ground truth).
- Run
./triangulation_evaluation/evaluate_ate.py with parameter, parameter help is written in the python parse format.
File Structure
├── Readme.md
├── data
│ └── rgbd_dataset_freiburg2_desk (dataset)
├── vo
│ ├── vo_tools.hpp (visual odometry functions)
│ └── vo_tools.cpp
├── ba
│ ├── ba_tools.hpp (bundle adjustment functions)
│ └── ba_tools.cpp
├── bag_of_words
│ ├── bow_tools.hpp (bag of words functions)
│ └── bow_tools.cpp
├── loop_closure
│ ├── LC_tools.hpp (loop closure functions)
│ └── LC_tools.cpp
├── test
│ ├── main.hpp (the main function to run demo)
│ └── CMakeLists.txt
├── results
│ ├── gt_positions.txt (ground truth trajectory)
│ ├── trajectory.txt (trajectory after simple visual odometry)
│ ├── ba.txt (trajectory after bundle adjustment)
│ └── looped.txt
├── evaluation
│ ├── plot.py (plot the trajectory)
│ └── evaluate_ate.py (evaluate the result)
├── CMakeLists.txt
└── Doxygen File (doxygen file of project)
├── html (please look at index.html)
└── latex
Authors
 1.8.16
1.8.16